Hella Aglaia, подключение датчика "с нуля" на ТС
1. Общие сведения
Датчик Advanced People Sensor (APS) осуществляет подсчёт пассажиров в сконфигурированной области (наблюдаемом пространстве), основываясь на стереоскопическом изображении с камер и обработке получаемого изображения. Полученная информация сохраняется локально и может быть транслирована посредством различных интерфейсов для постобработки.
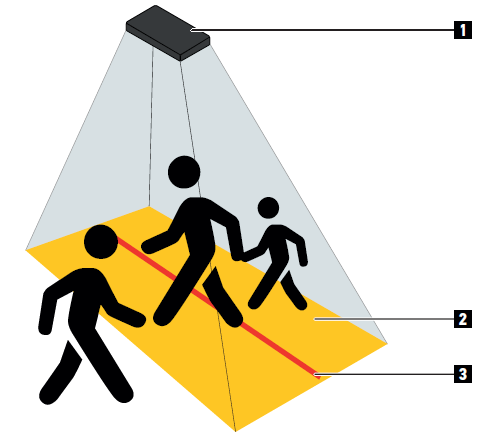
Принципиальная схема работы. Где на рисунке:
1 – Датчик APS
2 – Сконфигурированная область для мониторинга
3 – Линия пересечения
Результаты подсчёта могут быть проверены при помощи видео мониторинга. Таким образом будет достигаться максимальный и математически точный подсчёт.
Внешний вид и интерфейсы датчика
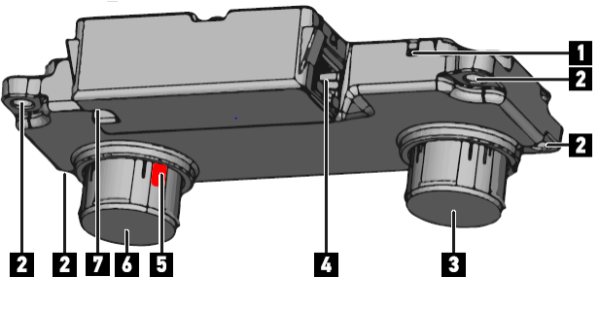
1- кнопка “Reset”
2- отверстия для крепежа
3- правая HDR-камера
4- Ethernet разъем
5- светодиод отображения статуса устройства
6- левая HDR-камера
7- интерфейс ввода/вывода (Mini-Fit-jr, 2x4)
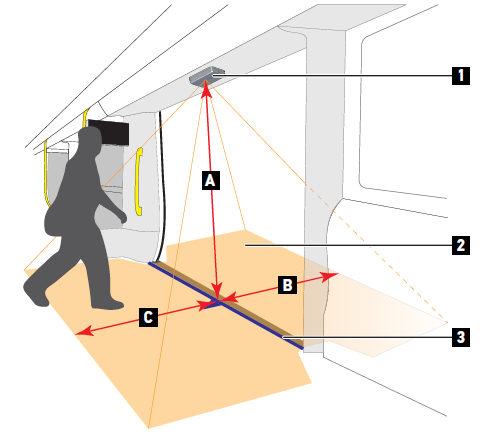
Требования к расположению датчика
Убедитесь, что:
- Датчик надёжно закреплен.
- Минимальное расстояние от пола до датчика (см. «1») не менее 200 см (см. «А»).
- Пространство между датчиком и человеческими головами не содержит посторонних предметов и препятствий.
- По возможности зона мониторинга (см. «2») не должна содержать отражений.
- Пассажиропоток должен следовать через центр.
- Линия пересечения (см. «3») должна быть на расстоянии не менее трети зоны мониторинга, т.е. люди, подходящие к линии, должны быть видимы чуть заранее.
- Начало и конец зоны мониторинга должны быть на расстоянии не менее 40 сантиметров от линии пересечения (см. «В» и «С»).
- Зона мониторинга достаточно освещена (не менее 3 Лк).
Необходимый ЗИП для калибровки датчика
1- Ноутбук c встроенной или выносной сетевой картой (rj45)
2- Сетевой кабель rj 45 для подключения к ЛВС (при наличии Wi-Fi на роутере можно воспользоваться и беспроводным способом подключения к роутеру)
3- Установленное на ноутбуке приложение для сканирования сети “Advanced IP Scanner” или его аналог
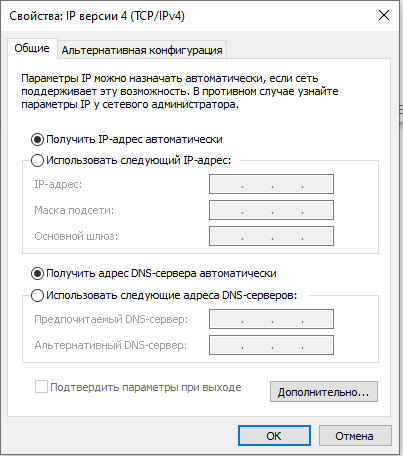
2. Установка соединения с датчиком
Ноутбук подключить к ЛВС бортового оборудования на ТС (к роутеру или коммутатору) с помощью сетевого кабеля (rj45). В настройках сетевого адаптера ноутбука нужно включить автоматическое получение IP адресов и DNS-сервера или установить статический адрес из вашей сети:
По умолчанию на ТС введенных в эксплуатацию сетевые настройки датчиков уже выполнены и имеют такой порядок:
Датчик 1 двери 192.168.Х.21
Датчик 2 двери 192.168.Х.22
Датчик 3 двери 192.168.Х.23
где "Х" - адрес сети, которую раздаёт ваш роутер
В случае отсутствия в сети указанных выше IP адресов, адреса датчиков нужно найти помощью приложения для сканирования сети “Advanced IP Scanner”, приложение бесплатное и доступно по ссылке https://www.advanced-ip-scanner.com/ru/
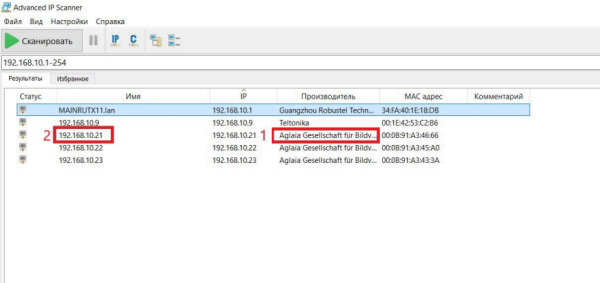
После запуска приложения сканируем сеть, в окне результата поиска IP адрес датчика определяем по производителю (1) слева указан его IP адрес (2).
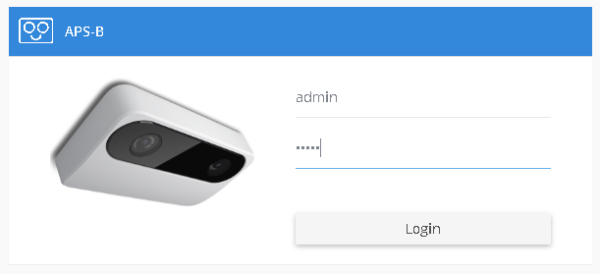
Откройте браузер и напишите в адресную строку IP-адрес датчика (например, 192.168.10.22)
Появится окно авторизации ДПП, в котором необходимо ввести логин: “admin”, пароль: “admin”.
В случае отсутствие соединения с датчиком необходимо проверить надежность подключения разъемов на ДПП и повторить подключение.
3. Web интерфейс
Обратите внимание, что в процессе настройки не рекомендуется обновлять страницу, т.к. вы можете потерять не сохранённые и введённые данные.
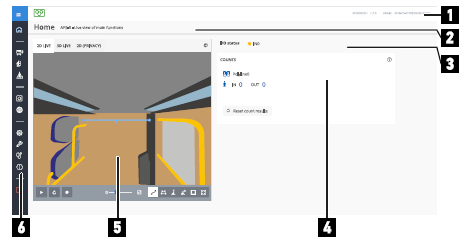
Элементы веб-интерфейса:
1- статусная строка
2- информационная строка
3- состояние обмена данными
4- окно настроек
5- изображение с камер
6- панель навигации
Статусная строка
1- дата и время, установленные на устройстве
2- версия прошивки
3- имя хоста, установленное на датчике
4- статусная информация
5- статусная иконка
Статусная иконка может принимать следующие виды:

Зелёная – самодиагностика оптической части говорит «ОК»
Жёлтая – «слишком ярко» или «слишком темно»
Красная – устройство чем-то закрыто или заклеено
4. Основные настройки
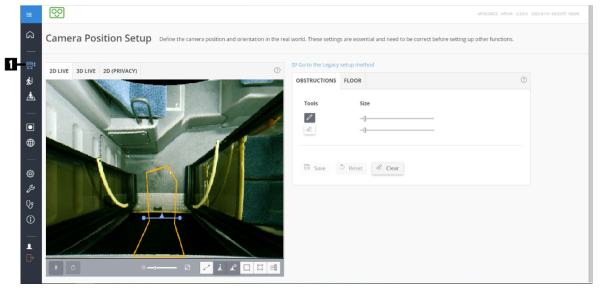
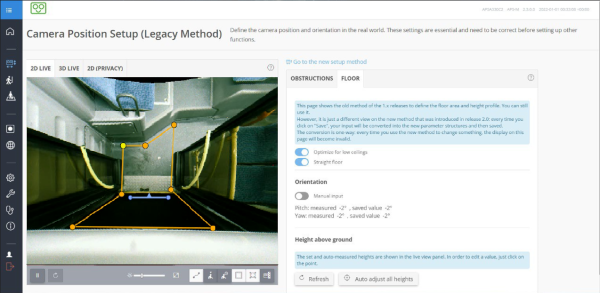
Положение камеры (Camera Position Setup)
Выберите в левом меню иконку (1) настроек положения камеры (Camera Position Setup).
Эти настройки являются обязательными и их нужно установить перед дальнейшей настройкой датчика
OBSTRUCTIONS – для указания препятствий
FLOOR – настройки пола ТС
Препятствия (OBSTRUCTIONS)
На точность подсчёта пассажиров могут влиять в том числе элементы обшивки, дверное оборудование, знаки выхода и прочие болтающиеся объекты, поскольку они могут попадать в кадр и в область наблюдения.
Если пассажиры будут находиться ниже этих объектов, то они могут выпадать из поля зрения датчика.
Перейдите во вкладку «Obstructions» для нанесения на схему этих объектов. Соответствующая кнопка не может быть отключена.
В данном разделе необходимо закрасить статичные объекты, находящиеся в зоне мониторинга между датчиком и полом (например, козырек, турникет и т.п.).
После введённых настроек необходимо нажать кнопку Save.
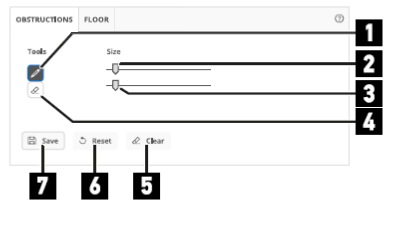
Для редактирования препятствий на картинке с камеры нажмите кнопку с «Карандашом» (1)
Для указания толщины рисования используйте слайдер справа (2)
Для маркировки объектов используйте мышь (нажмите в области рисования и удерживайте, чтобы нарисовать линию) (2)
Для удаления, нарисованного используйте кнопку «Ластик» (4)
Толщина также редактируется при помощи слайдера
Для очистки всего нажмите кнопку “Clear” (5)
Для сброса и отката к предыдущему состоянию выберите “Reset” (6)
Для сохранения нажмите “Save” (7)
Область пола (FLOOR)
Перейдите на вкладку “Floor” для установки области пола (зоны мониторинга, в которой ведётся детектирование и подсчёт людей). Областью пола также считается пространство за пределами ТС, обозреваемое датчиком.
Для начала необходимо нажать Go to the Legacy setup method, это переведет режим рисования в векторный.
• Примечание: область пола необходимо указывать при открытых дверях (т.к. датчик считает пассажиров только на остановках, когда срабатывают концевики дверей)
Укажите область пола с помощью рисования многоугольника, содержащего множество граней. Минимально может быть 3 точки, максимально – 20. Чтобы сделать новую точку необходимо навести курсор на желтую линию и нажать два раза.
Статичные элементы (например, стены или сиденья) не должны быть внутри этой зоны.
Для сброса нажмите соответствующую кнопку “Reset“, для сохранения – нажмите “Save”.
Картинка с камеры для задавания зоны пола в качестве примера:
Параметры Optimize for low ceilings и Straight floor должен быть включены.
Настройка Straight floor (прямой пол) может быть включена, если: пол ТС полностью ровный и находится на одном уровне с бордюром/тротуаром на остановках. В противном случае необходимо указывать расстояние до асфальта/улицы отдельно.
Настройка для пола, содержащего лестницы, аппарели, либо просто неровного.
Если ваш пол не отличается ровностью (например, есть лестницы и т.д.), отключите переключатель «Ровный пол» “Straight floor”:
Измерение высоты потолка вручную
По умолчанию, датчик автоматически определяет высоту от пола, но для неровных полов с лестницами возможно задавать высоту потолка над каждой гранью при рисовании «многоугольника» зоны пола. Для большей точности вы можете измерить высоты вручную.
Датчик измеряет значение «высоты» как расстояние до точки, что в случае лестниц может приводить к неправильным значениям. Измерять необходимо именно высоту между уровнем датчика и под углом 90 градусов к уровню пола.
Задание высоты потолка над точкой вручную:
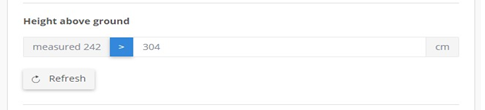
сначала двойным кликом ставите точку на ступени, далее указываете расстояние до нее в сантиметрах в правой части окна.
После введённых настроек необходимо нажать кнопку Save.
Правильное измерение расстояний до уровней пола в высокопольных ТС, содержащих лестницу на входе:
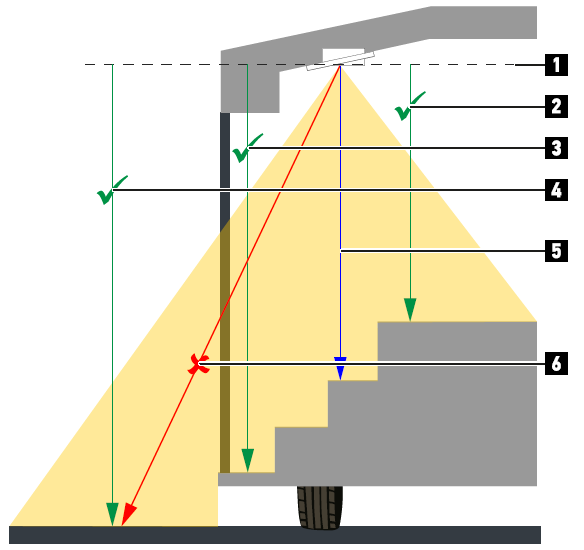
На рисунке:
1 – уровень устройства
2 – уровень чистого пола ТС
3 – уровень первой ступени
4 – уровень асфальта
5 – правильный метод измерения высоты
6 – неправильный способ
Линия пересечения и подсчет (People Counting Setup)
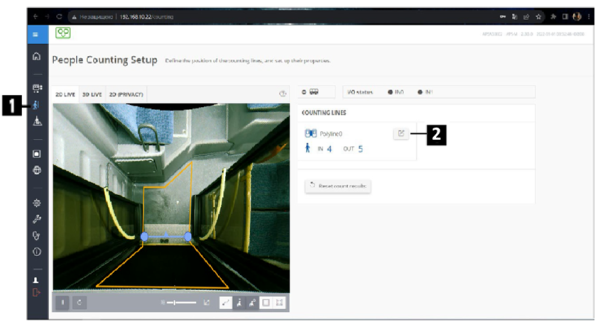
Выберите соответствующий пункт (1) в меню навигации слева и курсором разместите линию пересечения (голубого цвета) на линии двери, как указано на картинке:
Линия пересечения должна находиться на расстоянии как минимум трети от границы зоны мониторинга, т.е. чтобы пассажиры были определены системой до того, как они пересекут линию. Стрелка (треугольник) на линии должна быть направлена внутрь салона ТС.
После введённых настроек необходимо нажать кнопку Save.
Настройка концевиков
В разделе «Counting lines» нажмите на кнопку (2), чтобы перейти в меню настройки источника сигнала открытия/закрытия дверей. В нём есть несколько параметров
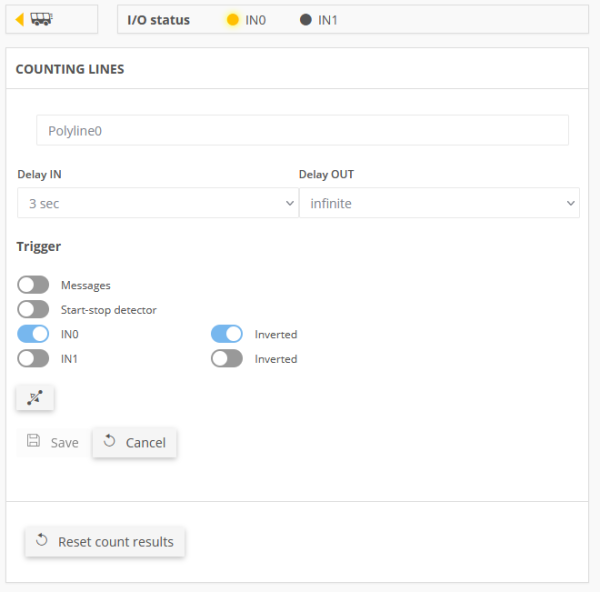
1. Delay IN/OUT. Задержка на запись при входе/выходе. Позволяет избежать случайных срабатываний, когда один пассажир несколько раз пересекает линию подсчёта (например когда стоит на ней). По стандарту рекомендуется выставлять параметр Delay IN – 10 sec, Delay OUT – infinite. Если область обзора меньше рекомендуемой и это влияет на качество подсчёта, Delay IN можно выставить на 3 sec.
2. Trigger. Источник сигнала открытия/закрытия дверей. Имеет подпараметры.
a. Messages. Сообщения о состоянии двери передаются от головного устройства по IBIS. В нашей версии приложения не используется
b. Start-stop detection. Состояние двери контролируется датчиком движения в HELLA. Если автобус движется, двери считаются закрытыми. Имеет высокую погрешность, и поэтому не рекомендуется.
c. IN0. Данные с концевика, подключённому к разъёму IN0. Значение Inverted позволяет инвертировать логический сигнал с концевика.
d. IN1. Аналогичен IN0.
Если выбрать несколько параметров в этом меню, устройство будет считать двери открытыми только при срабатывании всех условий.
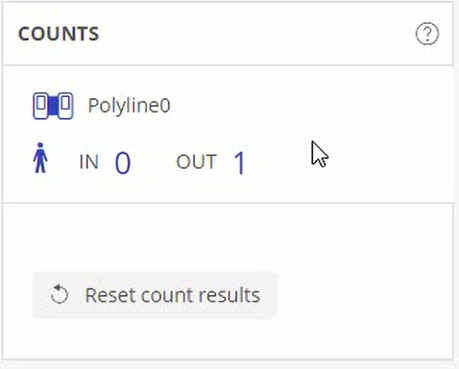
5. Проверка
В случае правильных настроек в предыдущих разделах, при пересечении пассажирами линии, указанной в разделе Подсчет, в правой части будет правильно указано количество зашедших (IN) и вышедших (OUT) пассажиров.
• Примечание: датчик начинает подсчет пассажиров только при открытии дверей.
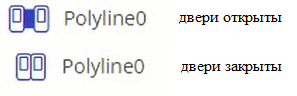
При изменении состояния дверей, индикатор должен отобразить соответствующие состояние:
6. Действия при некорректном подсчете
1. проверьте область пола (зону мониторинга)
2. проверьте правильность расположения и направления лини пересечения
3. проверьте наличие триггера (концевика) с датчика двери
4. проверьте правильность указания расстояния до ступеней (при их наличии)
5. повторите проверку (п.5.)
Теги:
Hella Aglaia | датчики пассажиропотока
